| [ начало ] | [ К ] |
Кинематика
— наука, изучающая состояние движения независимо от вызывающих его сил и получившая название от греческого слова κίνημα — состояние движения и составляющая часть общей науки о движении — механики. Цель ее состоит в изучении геометрических свойств движения, скоростей и ускорений: для достижения этой цели пользуются анализом и геометрией. К. называют геометрией четырех измерений, так как она имеет дело с тремя координатами пространства и еще с четвертым переменным, представляющим собой время. Скорости представляются первыми производными от координат по времени, ускорение — вторыми производными и еще, кроме того, рассматриваются производные от координат по времени высших порядков, называемые ускорениями высших порядков. С аналитической точки зрения вся К. сводится к изучению соотношений, существующих между этими величинами. В последнее время появилось стремление к изучению К. чисто геометрическими способами. Первые, весьма общие кинематические теоремы, чисто геометрического характера даны были знаменитым Пуансо (Poinsot) в его "Th é orie nouvelle de rotation des corps" в 1834 году. Если рассматривать движение таких систем, все точки которых движутся в плоскостях, параллельных между собой, то дело приводится к рассмотрению движения плоских фигур в плоскости (К. на плоскости). Перемещение неизменяемой фигуры в плоскости вполне определяется перемещением неизменяемо соединенного с той фигурой прямолинейного отрезка. Всякое же перемещение в плоскости прямолинейного отрезка из одного положения в другое может быть произведено вращением отрезка около некоторой точки, называемой центром перемещения.
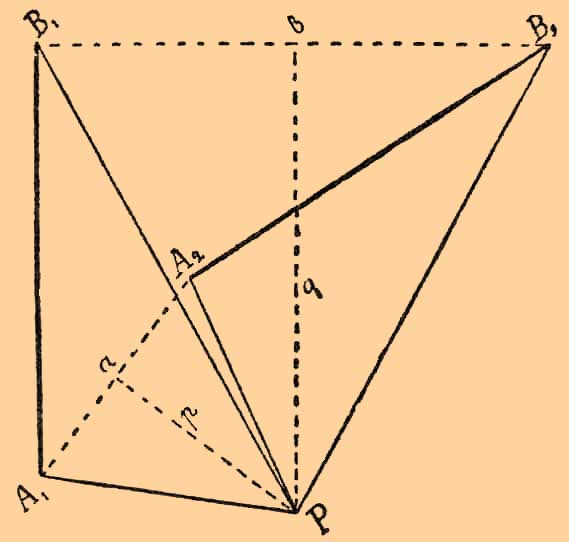
Действительно: пусть A1B1 и А 2 В 2 будут два положения отрезка AB; восставим из середин А 1 А 2 и В 1 В 2 перпендикуляры ар и bq, которые пересекутся в некоторой точке P. Из равенства треугольников не трудно видеть, что PA1=PA2 и PB1=PB2 и что, следовательно, точка A может быть переведена из положения A1 в положение А 2 вращением прямой PA около точки P; точно так же доказывается, что точка B может быть переведена из положения В 1 в положение B2 вращением прямой PB около точки P. Следовательно, весь отрезок AB может быть перемещен из положения А 1 В 1 в положение А 2 В 2 вращением треугольника PAB около точки P, которая и называется центром перемещения. В случае взаимной параллельности положений А 1 В 1 и А 2 В 2 центр перемещения лежит в бесконечности.
Непрерывное движение плоской фигуры в ее плоскости рассматривается как ряд бесконечно малых перемещений фигур из одного положения в соседнее; для каждых двух соседних положений существует свой центр перемещения, называемый, в случае непрерывного движения фигуры, мгновенным центром, потому что фигура переходит из одного положения в соседнее (бесконечно мало отличающееся от первого) в бесконечно малый промежуток времени, в течение которого она, по доказанному, вращается около мгновенного центра; в следующий момент фигура переходит из второго положения в третье, вращаясь около другого мгновенного центра, и т. д. Последовательный ряд мгновенных центров образует в неподвижной плоскости кривую, называемую неподвижной полодией. В плоскости, совпадающей с неподвижной, но неизменяемо соединенной с фигурой и увлекаемой ею в ее движении, ряд мгновенных центров образует кривую, называемую подвижной полодией, и движение данной фигуры происходит так, как будто фигура эта, неизменяемо соединенная с подвижной полодией, увлекалась в движение тем, что подвижная полодия катится (см. Катание) по неподвижной полодии. Итак, движение плоских неизменяемых фигур в их плоскости приводится к катанию кривых. В каждый данный момент мгновенный центр находится в точке взаимного прикосновения полодий, и фигура вращается на бесконечно малый угол около этой точки. Поэтому скорости всех точек движущейся фигуры и точек, неизменяемо соединенных с нею, пропорциональны прямым (радиус-векторам), проведенным из этих точек в мгновенный центр, соответствующий данному моменту, и направлены по перпендикулярам к упомянутым радиус-векторам. Подобным же образом движение твердого тела около неподвижной точки и исследование скорости этого движения приводится к изучению катания одного конуса по другому, причем вершины обоих конусов находятся в неподвижной точке, а конусам этим присваивается название аксоидов. Самое общее (всякое) движение твердого тела приводится к катанию одной линейчатой поверхности (см.) по другой, соединенному со скольжением (см.). Движение около точки и общее движение изучаются К. в пространстве. К. изучает и движение изменяемых систем. Скорости поступательные, скорости вращения и ускорения изображаются прямолинейными отрезками и складываются по правилам сложения векторов (см. Сложение векторов). Доказывается, что в бесконечно малый момент всякое движение неизменяемой системы приводится к винтовому. К. жидкого тела опирается главнейшим образом на исследование деформаций бесконечно малого параллелепипеда и на конформное преобразование плоскостей мнимого переменного.
Выделение К., как особой науки, из общего цикла наук о движении произведено было Ампером в его "Essai sur la philosophie des sciences" в 1834 г. Чисто аналитическую обработку К. получила в сочинении Резаля: "Trait é de ciné matique pure". В следующих сочинениях: Бобылев, "Курс аналитической механики"; Schel, "Theorie der Bewegung und der Kr äfte"; Collignon, "Traité de mecanique"; Сомов, "Теоретическая механика" и во многих других методы аналитический и геометрический взаимно дополняются. Превосходное, чисто геометрическое изложение К. дается в книге Бурместра "Lehrbuch der Kinematik". В связи с приложением к теории механизмов К. трактуется в классическом сочинении Reuleaux "Theoretische Kinematik" (1888), а также в следующих: Willis, "Principles of Mechanism" (1841); Giulio, "Elem enti di cinématica applicata alle arti" (1847); Laboulaye, "Traité de cinématique" (1849, 1864, 1878); Morin, "Notion géométriques sur les mouvements et leurs transformations" (1851); Girault, "Eléments de Géométrie appliquée à la transformation du mouvement dans les machines" (1858); Belanger, "Traité de cinématique" (1864); Haton de la Goupillière, "Traité de mécanismes" (1864); Bour, "Cours de mé canique et machines" (1865) и Streinz, "Physikalische Grundlagen der Mechanik" (1883). К. жидкого тела изложена в сочинении профессора Жуковского: "Кинематика жидкого тела" (1876).
H. Делоне.
|
Page was updated:Tuesday, 11-Sep-2012 18:15:34 MSK |