| [ начало ] | [ О ] |
Остойчивость*
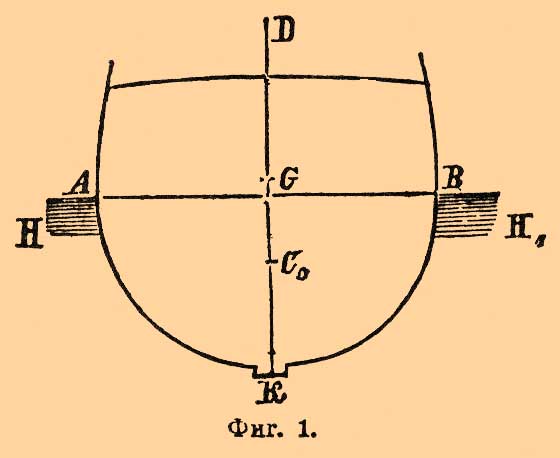
— качество корабля находиться в равновесии в прямом положении и, будучи из него выведенным действием какой-либо силы, снова к нему возвращаться по прекращении ее действия. Это качество одно из важнейших для безопасности плавания; было много примеров гибели судов от недостаточной их О. О. корабля зависит как от его обводов, т. е. формы его наружной поверхности, так и от распределения грузов; пусть АВК (фиг. 1) представляет сечение корабля вертикально поперечной плоскостью, проходящей через центр тяжести его G, DK — пересечение диаметральной плоскости с плоскостью чертежа.
Фиг. 1.
При прямом положении корабля диаметр. плоскость его перпендикулярна к горизонту воды HH1 и тогда центр давления С 0, совпадающий с центром тяжести вытесненного объема воды и называемый в теории корабля центром величины, располагается на одной отвесной линии с точкой G, вес же вытесненной воды равен весу корабля. Пусть (фиг. 2) A1B1K представляет тот же корабль наклоненным около продольной оси на угол θ.
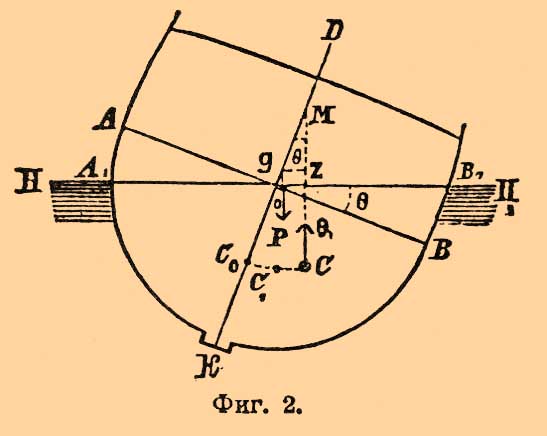
Фиг. 2.
От этого форма подводной части корабля изменилась, ибо часть A1QA
вышла из воды, часть же BGB1
вошла в воду, вследствие этого центр величины из положения С 0
переместится в другое положение С и уже не будет находиться на одной
отвесной линии с точкой G.
В точке О приложен вес корабля Р, в точке С
равнодействующая давления воды Q;
обе эти силы направлены вертикально, первая вниз, вторая вверх, и если при
наклонении водоизмещение не изменилось, то Q = P,
и тогда эти силы составляют пару, момент которой равен P.Gz,
и которая, в зависимости от
относительного положения точек G
и С, стремится или вернуть корабль к прямому положению, если центр
величины будет в С, или еще более накренить корабль, если центр величины
переместился не в С, а в С 1.
В первом случае корабль остойчив, во втором неостойчив. При наклонении на данный
угол перемещение центра величины зависит только от обводов корабля, положение же
центра тяжести его G
от распределения на корабле грузов — значит О. зависит от обеих этих причин.
Вместо того, чтобы рассматривать относительное положениe точек G
и С, из которых первая постоянна для данной нагрузки корабля, положение
же второй изменяется с наклонением, продолжают направление силы Q
до пересечения в точке M
с диаметральной плоскостью, тогда видно, что корабль остойчив, если точка
M лежит выше центра тяжести
корабля G и
неостойчив в противном случае. Оказывается, что для малых углов наклонения (для
высокобортных судов до 10°, для низкобортных — пока палуба их не начнет уходить
в воду) положение точки M
постоянное, независимое от наклонения корабля. Эта точка называется
метацентром и условие О. выражается тем, чтобы центр тяжести корабля лежал
ниже метацентра. Положение метацентра зависит только от обводов корабля и
вычисляется, пользуясь теоретическим чертежом корабля, для всякого его
углубления, для чего наносят соответствующую грузовую ватерлинию и вычисляют при
ней водоизмещение корабля V
(по объему) и положение центра
величины С 0
— метацентр находится над ним на той же отвесной линии в расстоянии
 . Входящая в
эту формулу величина
. Входящая в
эту формулу величина
 представляет
собою момент инерции площади грузовой ватерлинии относительно продольной оси и
вычисляется обыкновенно по одной из приближенных формул квадратур трапеций или
Симсона, т. е. J = (2/3)h[(1/2)y13 + y32
+ y33 +... + y3u-1
+ (1/2)y3n] или же J = (2/3)(h/6) [y31
+ 4y32 + 2y33 + 4y34
+... 4y32k + y3 2k
+ 1], где h есть
промежуток между ординатами, а y 1, y2...
ординаты, т. е. полуширины грузовой при соответствующих шпангоутах, число
которых при пользовании второй из этих формул должно быть нечетное. Мерой О.
корабля служит момент РGz восстановляющей пары, но плечо ее Gz
= GMsin θ. Полагая
C0G = a,
видно, что GM =
ρ —
α, так что PGz
= P( ρ —
α )sin θ
= Р (J/V
— α) sin θ.
представляет
собою момент инерции площади грузовой ватерлинии относительно продольной оси и
вычисляется обыкновенно по одной из приближенных формул квадратур трапеций или
Симсона, т. е. J = (2/3)h[(1/2)y13 + y32
+ y33 +... + y3u-1
+ (1/2)y3n] или же J = (2/3)(h/6) [y31
+ 4y32 + 2y33 + 4y34
+... 4y32k + y3 2k
+ 1], где h есть
промежуток между ординатами, а y 1, y2...
ординаты, т. е. полуширины грузовой при соответствующих шпангоутах, число
которых при пользовании второй из этих формул должно быть нечетное. Мерой О.
корабля служит момент РGz восстановляющей пары, но плечо ее Gz
= GMsin θ. Полагая
C0G = a,
видно, что GM =
ρ —
α, так что PGz
= P( ρ —
α )sin θ
= Р (J/V
— α) sin θ.
Величина a возвышения центра тяжести корабля над его центром величины вычисляется при составлении проекта корабля и, кроме того, непременно определяется из опыта, сущность которого состоит в том, что поперек корабля перемещают груз p, составляющий около 1/100 водоизмещения корабля P с одного борта к другому, и замечают по длинным отвесам происходящие от этого наклонения корабля θ, тогда величина GM = ρ — a = (pl/P)cotg θ, где 1 есть перемещение груза р. Эта величина для больших паровых судов составляет около 2 1/2 — 3 1/2 фт. При больших углах наклонения величина ρ, входящая в формулу восстановляющей пары, не может считаться постоянной, и эта формула не имеет места. Поэтому, чтобы судить об О. корабля и для углов, больших указанных выше пределов, проводят ряд ватерлиний, отсекающих данный подводный объем V и наклоненных к грузовой ватерлинии под углами 10°, 20°, 30° и т. д. и вычисляют соответствующее каждой из них положение центра величины, а по нему и плечи Gz восстановляющей пары. Результаты такого вычисления представляют графически, откладывая по одной оси углы наклонения θ, а по другой соответствующие плечи Gz или моменты P.qz. Полученная кривая называется диаграммой статической О. или диаграммой Рида, предложившего ее. Имея такую диаграмму, можно тотчас же найти угол наклонения корабля под действием данной кренящей пары, для чего, отложив момент этой пары ON по оси моментов (фиг. 3), проводят прямую NL параллельно оси θ до пересечения с кривой в точке L; соответствующий угол n0 и будет искомый, в котором корабль, под действием данной пары, будет находиться в равновесии.
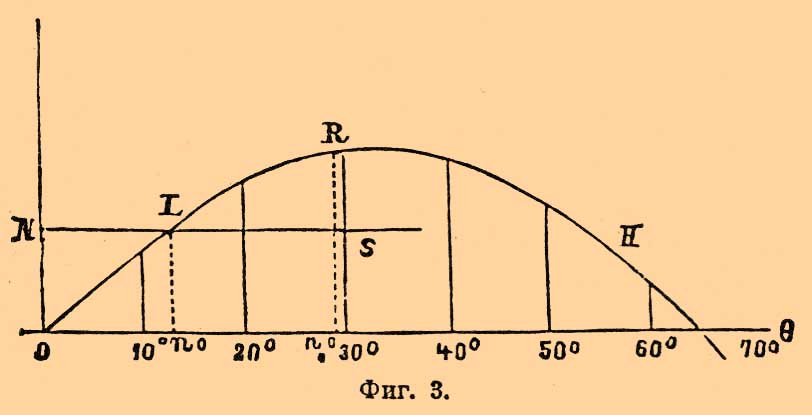
Фиг. 3.
Если кренящая пара не будет постепенно и медленно возрастать от О до величины ON, а будет сразу приложена полностью, как, например, при действии порыва ветра, то корабль перейдет за положение равновесия и наибольший угол наклонения его будет не n0, а иной, который определится из того условия, чтобы, при наклонении до него, работа кренящей пары равнялась работе пары восстановляющей. Действительно, пока корабль, под действием внезапно приложенной пары с моментом ON, наклоняется до угла n0, кренящая пара больше восстановляющей и, значит, корабль, повинуясь разности их, будет вращаться ускоренно и, дойдя до угла n0, будет иметь такую угловую скорость, при которой живая сила вращательного движения его равна разности работ кренящей и восстановляющей пар (пренебрегая сопротивлением воды). На диаграмме эта работа изображается площадью ONL. Вследствие приобретенной скорости, корабль перейдет за положение равновесия и при этом его дальнейшем наклонении восстановляющая пара больше кренящей, значит, движение будет замедленное и продолжится до тех пор, пока угловая скорость не станет равна О, т. е. пока живая сила, которой обладал корабль при наклонении на n0, не сравняется с разностью работ восстановляющей и кренящей пар, т. е. пока площадь LRS не станет равной ONL. Таким образом, корабль наклонится на угол n01, который обыкновенно больше в два раза превосходит такой угол n0, при котором корабль этой парой удерживается в равновесии, ибо диаграмма обращена выпуклостью вверх.
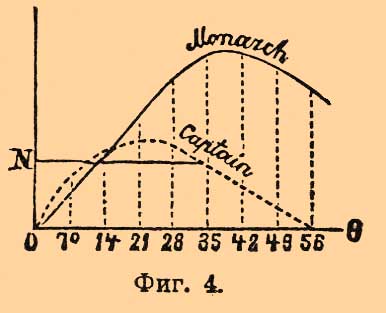
Фиг. 4.
Работа восстановляющей пары при наклонении корабля служит мерой так наз. динамической его О., на которую стали обращать внимание после гибели, в 1870 г., англ. броненосца "Captain"; при первом же пробном плавании "Captain" был опрокинут налетевшим шквалом, не принесшим никакого вреда другим кораблям эскадры, что и было за полтора года перед тем предсказано Ридом в его докладе англ. обществу корабельных инженеров Institution of Naval Architects. Из 550 человек команды "Captain"'а спаслись только 17. На фиг. 4 представлены диаграммы О. "Captain"'a и "Monarch"'a, одинакового с ним по размерам и водоизмещению, но имевшего надводный борт высотой в 14 фт., тогда как у "Captain"'а было всего 5 1/2 фт.; как видно, шквал, который накренил бы "Monarch"'a до 25°, достаточен, чтобы опрокинуть "Captain", между тем для малых углов "Captain" был остойчивее "Monarch"'a. Способы вычисления О. излагаются в сочинениях по теории корабля, напр., Pollard et Dudebout, "Theorie du Navire"; Schmidt, "Stabilit ä t von Schiffen"; их можно также найти в справочных книгах для инженеров, напр., Johow, "Hilfsbuch für den Schiffbau"; "Die Hü tte" и пр.
А. Крылов.
|
Page was updated:Saturday, 26-Nov-2016 22:10:21 MSK |